PicoBello Workshops
PicoBello-Konzept
Dies ist ein Wiki für Interessierte und PicoBello-Workshop-Teilnehmende.
Programmier-Projekte in Theorie und Praxis mit dem Raspberry Pi Pico für Einsteiger ohne Programmierkenntnisse
Die Workshops erfolgen als Jitsi-Webmeeting, also online von PC zu PC.
Ziel der Workshops
- Ziel ist, dass Teilnehmende eigene Projekte mit dem Pico selbst planen und umsetzen können.
- Die Workshops PicoBello-01 und -02 sind Voraussetzungen für die weiteren PicoBello-Workshops.
Teilnahmevoraussetzungen für PicoBello-01
- Teilnehmende: Lesen und Schreiben können und INTERESSE haben.
- Technik:
- Windows- oder Apple-PC (für den Programmier-Editor) mit
- Internetanschluss (für die Teilnahme am Jitsi-Meeting).
Workshop-Termine
Aktuelle PicoBello-Termine, siehe:
https://www.elektronik-kompendium.de/service/events/
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
Material-Set Pico
- 1 Raspberry Pi Pico, RP2040 Mikrocontroller mit angelöteten Stiftleisten auf Steckbrett mit 830 Kontakten
- 1 Steckbrett mit 400 Kontakten
- 1 USB-Kabel 1,5 m mit Micro USB Stecker
- 40 Verbindungskabel 10 cm
- 5 Taster
- 10 Widerstände 470 Ohm
- 5 Widerstände 10 kOhm
- 15 LEDs (5 rote, 5 gelbe und 5 grüne)
- 1 aktiver Summer
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
Prinzipieller Ablauf: Pico-Vorbereitung, -Programmierung und -Betrieb
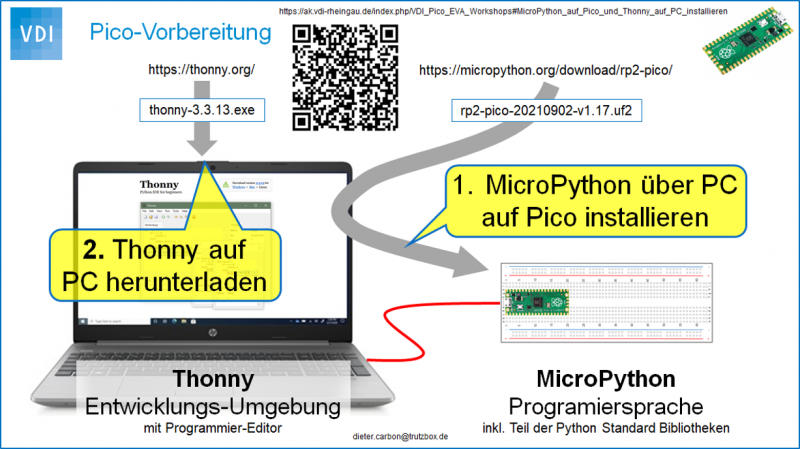
- Zunächst (1) das Progammiersystem "MicroPython" (Datei: rp2-pico-20210902-v1.17.uf2) von https://micropython.org/download/rp2-pico über den PC auf den Pico installieren; Link zur detaillierteren Vorgehensweise
- Dann (2) die Entwicklungsumgebung "Thonny" (Datei: thonny-3.3.13.exe) von https://thonny.org herunterladen, und aufrufen.
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
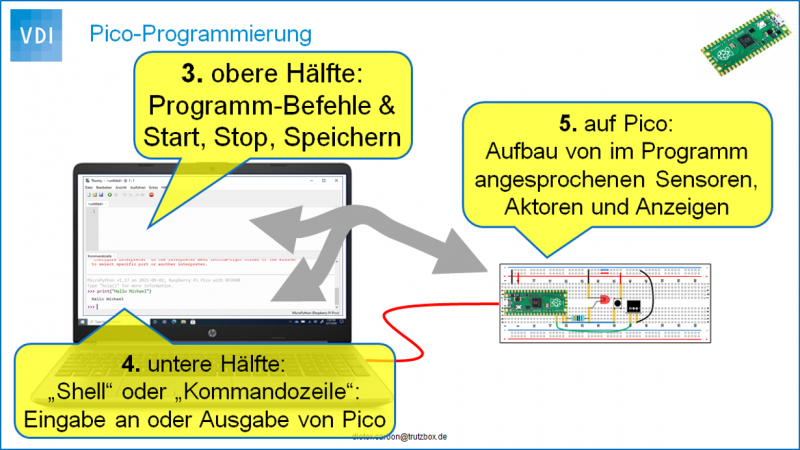
- Das Thonny-Fenster ist in der Basis-Version zweigeteilt: in der oberen Hälfte (3) wird das aktuell bearbeitete Programm angezeigt; Programme können aufgerufen, bearbeitet, abgespeichert, gestartet oder gestoppt/beendet werden.
- In der unteren Hälfte (4), welche mit "Kommandozeile" (oder "Shell") überschrieben ist, können Direkt-Befehle an den Pico gegeben, Programm-Eingaben abgefragt und Programm-Ausgaben angezeigt werden.
- Auf dem Pico-Steckbrett (5) werden die im Programm angesprochenen Ein- und Ausgabegeräte sowie Anzeigen mit Verbindungskabeln verbunden.
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
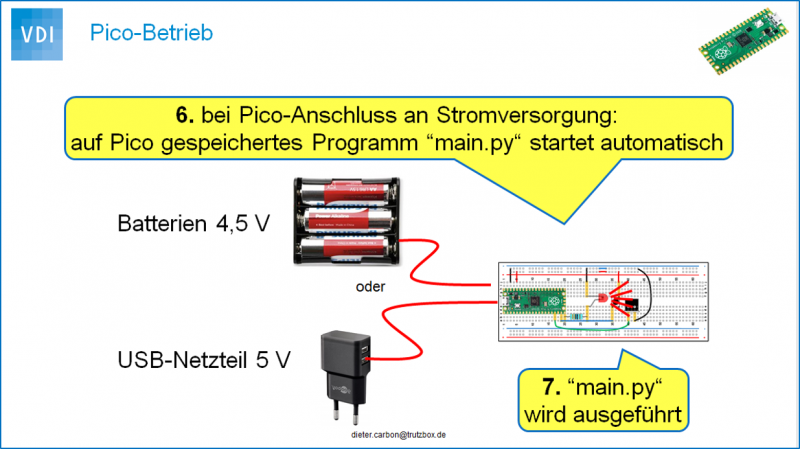
- Nach der Programm-Fertigstellung kann der Pico vom PC getrennt werden, um selbständig zu "laufen". Vorher muss das beabsichtigte Programm unter "main.py" auf dem Pico gespeichert werden, denn bei Anschluss einer externen Stromversorgung (6) per Batterien oder USB-Netzteil (oder Onboard-Netzteil) startet der Pico automatisch das Programm "main.py".
- Das Programm "main.py" läuft dann (7) selbständig mit allen programmierten Ein- und Ausgaben, sowie Anzeigen.
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
Workshop PicoBello-01
Projekte / Programme
Im Folgenden sind die in diesem Workshop besprochenen Programme aufgeführt (TLN = Teilnehmende; WSL = Workshop-Leiter).
Die Projekt-/Programm-Beschreibungen umfassen:
- Screenshot des Programms in Thonny, speziell, wenn in der Kommandozeile Programm-Eingaben und -Ausgaben gezeigt werden sollen,
- kopierfähiger Programmcode im Bereich "MicroPython Programm-Code für Thommy",
- Steckbrett-Graphik mit benötigten Kabel-Verbindungen und Bauteilen,
- Steckbrett-Foto mit einer Beispiel-"Steckung".
In den Workshops gehen wir folgendermaßen vor:
- Der WSL erklärt kurz Sinn und Zweck des nächsten Projekts.
- Der WSL zeigt seine Projekt-Steckung live per Video, startet das Programm und zeigt und erklärt die Programm-Auswirkungen.
- Die TLN kopieren den Programm-Code in ihren eigenen Thonny-Editor.
- Die TLN bauen ihre eigene Steckung anhand der Steckbrett-Graphik und des Steckbrett-Fotos.
- Die TLN starten jeweils ihr Programm und beobachten die Programm-Auswirkungen.
- Die TLN bestätigen die planmäßige Ausführung, oder beschreiben ein Problem oder einen Fehler.
- Gemeinsam werden Problem oder Fehler besprochen und GEKLÄRT.
- Erst wenn alle TLN-Programme planmäßig laufen, wird das nächste Programm in Anmgriff genommen.
- Abhängig vom Workshop-Verlauf bestimmt der WSL Projekt-Inhalte und -Folge des Workshops.
Die Projekte / Programme sollen die Basis dafür bieten, dass die TLN die Programme anschließend selbständig nachvollziehen und erweitern, sowie eigene Projekte planen und durchführen können.
- Was macht das Programm? erklärt, was das jeweilige Programm bewirkt.
- Beschreibung der Befehle erläutert kurz benutzte Programm-Befehle .
- Was probieren ...? gibt Anregungen zum selber experimentieren .
Mit eckigen Klammern [ ] werden Programm-Befehle beschrieben; "Z4" steht für Zeile 4.
Viel Spaß beim Testen und Ausprobieren ...
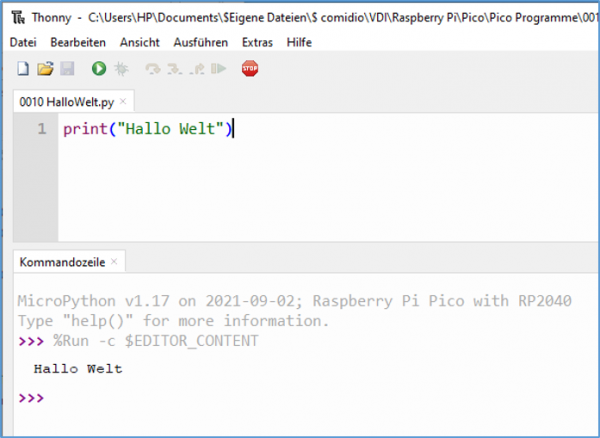
0010 HalloWelt.py
Media:0010 HalloWelt.txt
Was macht das Programm?
- Es testet, ob die Verbindung PC (mit Thonny) zu Pico (MicroPython) funktioniert, und meldet bei Erfolg: erstes Lebenszeichen des Picos.
Beschreibung der Befehle
- Durch den Befehl [print] zeigt der Pico Informationen in der Kommandozeile des Thonny-Editors an
- in anschließender Klammer folgt die anzuzeigende Ausgabe-Information:
- Text in Anführungszeichen wird angezeigt, z.B. print("Hallo Welt") ergibt Hallo Welt in der Kommandozeile.
- in anschließender Klammer folgt die anzuzeigende Ausgabe-Information:
Was probieren ...?
- Text in Anführungszeichen ändern,
- print Befehl mehrfach anwenden.
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
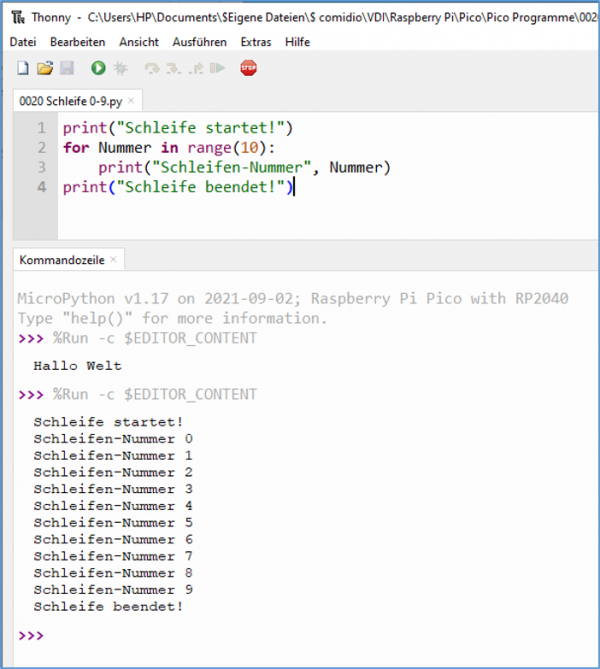
0020 Schleife 0-9.py
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
print("Schleife startet!")
for Nummer in range(10):
print("Schleifen-Nummer", Nummer)
print("Schleife beendet!")
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
Was macht das Programm?
- Es bildet eine Schleife mit einer Anzahl von Durchläufen.
Beschreibung der Befehle
- Der Befehl [print] zeigt Informationen im Thonny-Bereich Kommandozeile
- in anschließender Klammer folgt die anzuzeigende Ausgabe-Information:
- Text in Anführungszeichen wird angezeigt, z.B. print("Schleife startet!") ergibt Schleife startet! in der Kommandozeile
- Variable werden mit ihrem Variablen-Namen angegeben, z.B. print(Nummer) ergibt z.B. 3 in der Kommandozeile
- Anzeige-Informationen werden durch "," getrennt, z.B. print("Schleifen-Nummer ", Nummer) ergibt z.B. Schleifen-Nummer 3 in der Kommandozeile
- in anschließender Klammer folgt die anzuzeigende Ausgabe-Information:
- Der Befehl [for Nummer in range(10):] bildet eine bedingte Schleife,
- was in der Schleife passiert, wird 4 Leerzeichen eingerückt
- die Variable "Nummer" (Variablen-Name ist frei wählbar) läuft von "0" bis "9" (Achtung: 10 mal, aber nicht bis "10"!)
- wenn in der range-Klammer nur ein Wert steht, ist dies der "End"-Wert (der nicht erreicht wird) und der Anfangs-Wert ist "0".
- was nach der Schleife erfolgt, hat die selbe Einrückung wie "for"
Was probieren ...?
- Den Schleifen-Zähler End-Wert (anfangs "10") verändern.
- Die Variable "Nummer" umbenennen.
- Den Mitteilungstext in der print-Klammer verändern.
- ...
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
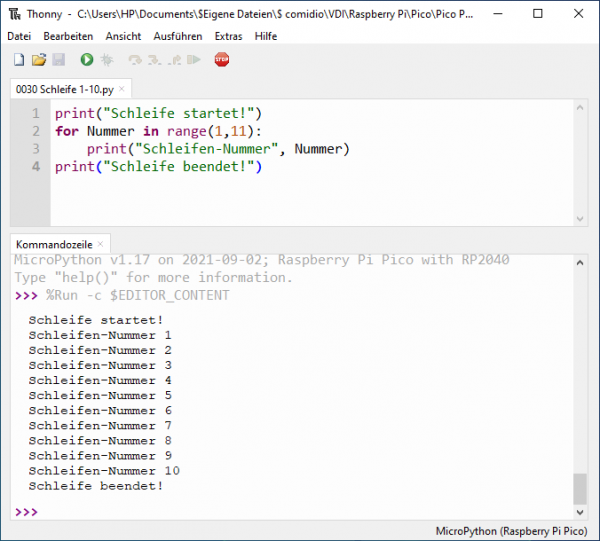
0030 Schleife 1-10.py
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
print("Schleife startet!")
for Nummer in range(1,11):
print("Schleifen-Nummer", Nummer)
print("Schleife beendet!")
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
Was macht das Programm?
- Es bildet eine Schleife mit einer Anzahl von Durchläufen, wie "0020 Schleife 0-9.py".
Beschreibung der Befehle
- In der range-Klammer sind (im Gegensatz zu Programm 0020) zwei Werte eingetragen; der erste ist der Start-Wert und der zweite ist der End-Wert.
- Die Variable "Nummer" (Variablen-Name ist frei wählbar) läuft von "1" bis "11" (Achtung: 10 mal, aber nicht bis "11"!)
Was probieren ...?
- Start-Wert und End-Wert verändern.
- ...
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
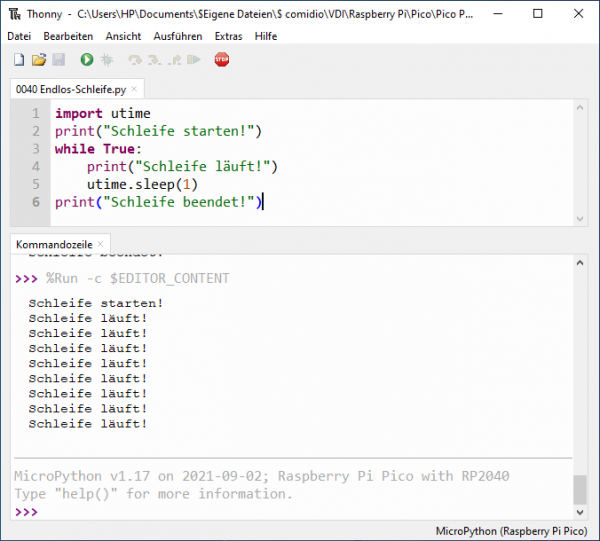
0040 Endlos-Schleife.py
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
import utime
print("Schleife starten!")
while True:
print("Schleife läuft!")
utime.sleep(1)
print("Schleife beendet!")
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
Was macht das Programm?
- Es bildet eine Endlos-Schleife, d.h. es kommt nicht zu einem Ende, sondern muss abgebrochen, bzw. gestoppt werden.
- Es schreibt im Sekundentakt und endlos (in die Kommandozeile) "Schleife läuft".
Beschreibung der Befehle
- Mit [import] werden sogenannte "Bibliotheken" (Programmpakete) eingebunden, durch die der Pico zusätzliche, spezielle Programm-Befehle nutzen kann.
- Die Bibliothek "utime" bietet zeitbezogene Befehle, wie z.B. Zeitverzögerungen, quasi "Pausen".
- Der Schleifen-Befehl [while] prüft eine Bedingung auf "Wahrheit", ob ein Zeit- oder Wert-Vergleich zutrifft, also "wahr" ist; solange die Bedingung "wahr", also zutreffend ist, wird die Schleife durchlaufen. Wenn nicht (mehr) "wahr", wird der Folge-Befehl mit [while]-Einrückung - also [print] in Z6 - ausgeführt.
- "True" hinter [while] bedeutet quasi automatische und andauernde Bedingungs-Erfüllung. Daher wird der Folge-Befehl [print] in Zeile 6 NIE erreicht.
- Die Schleifen-Befehle [print] und [utime.sleep] in Z4 und Z5 werden durchlaufen und nach Z5 wird "hochgesprungen" zu Z4 und so wird die Schleife endlos durchlaufen.
- Der [print]-Befehl in Z6 wird nicht erreicht.
- Das Programm kann nur durch Stoppen beendet werden.
- [utime.sleep] bedeutet eine Pause in Anzahl Sekunden, deren Wert in der Folge-Klammer steht; Dezimal-Angaben werden mit "." angegeben, also z.B. [utime.sleep(0.8)] bedeutet eine Pause von 0,8 Sekunden.
Was probieren ...?
- Den Pausenwert (Klammerwert hinter [utime.sleep]) variieren.
- ...
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
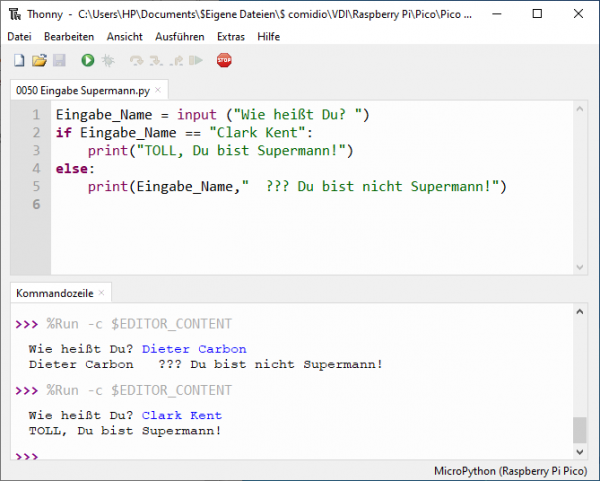
0050 Eingabe Supermann.py
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
Eingabe_Name = input ("Wie heißt Du? ")
if Eingabe_Name == "Clark Kent":
print("TOLL, Du bist Supermann!")
else:
print(Eingabe_Name," ??? Du bist nicht Supermann!")
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
Was macht das Programm?
- Es fragt eine Namens-Eingabe ab und prüft auf Übereinstimmung, also "Gleichheit" mit "Clark Kent".
- Abhängig von der Eingabe ist man Supermann oder nicht.
- Das Programm läuft nur ein Mal durch, unabhängig von der Eingabe.
Beschreibung der Befehle
- Der Befehl [input] bewirkt die Anzeige des Klammertextes in der Kommandozeile, und ordnet die Eingabe der frei wählbaren Variablen "Eingabe_Name" zu.
- Das Zeichen "=" ordnet Werte zu, wie in Z1.
- Das Zeichen "==" wird in der Abfrage, ob 2 Werte identisch sind, benutzt, wie in Z2.
- [if ...:][else:] ist ein Abfrage-Befehl, der aufgrund des Abfrageergebnisses verzweigt, und den einen oder den anderen "Ast" durchläuft.
- Wenn die Abfrage in Z2 stimmt, wird Z3 durchlaufen ... und dann Z6 ... und Ende.
- Wenn die Abfrage in Z2 NICHT stimmt, wird Z5 (und NICHT Z3) durchlaufen ... und dann Z6 ... und Ende.
Was probieren ...?
- Den Abfrage-Text verändern.
- Weitere Zeilen nach Z3 oder Z5 einfügen.
- Die Variable "Eingabe_Name" verändern.
- ...
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
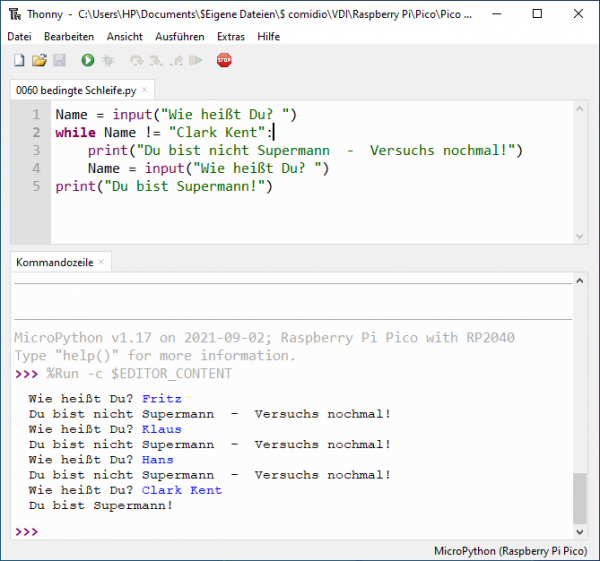
0060 bedingte Schleife.py
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
Name = input("Wie heißt Du? ")
while Name != "Clark Kent":
print("Du bist nicht Supermann - Versuchs nochmal!")
Name = input("Wie heißt Du? ")
print("Du bist Supermann!")
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
Was macht das Programm?
- Es prüft, wie 0050, ob die Eingabe mit "Clark Kent" übereinstimmt.
- Es loopt (= wiederholt die Schleife; von engl. loop = Schleife, Kreis, Kreislauf) und läuft so lange mit Abfragen, bis die "richtige" Eingabe erfolgt.
Beschreibung der Befehle
- Der Vergleichs-Operator "!=" bedeutet "ist NICHT identisch".
- Also bedeutet Z2: Solange die Variable "Name" ungleich "Clark Kent" ist, ist die [while]-Bedingung erfüllt, die Schleife Z3+Z4 wird durchlaufen, und Z3 fortwährend abgefragt.
- Wenn die Variable "Name" GLEICH "Clark Kent" ist, die [while]-Bedingung also NICHT erfüllt ist, wird die Schleife Z3+Z4 NICHT MEHR durchlaufen, Z5 angesprungen ... und danach das Programm beendet.
Was probieren ...?
- Eingabe-Variable "Name" umbenennen.
- ...
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
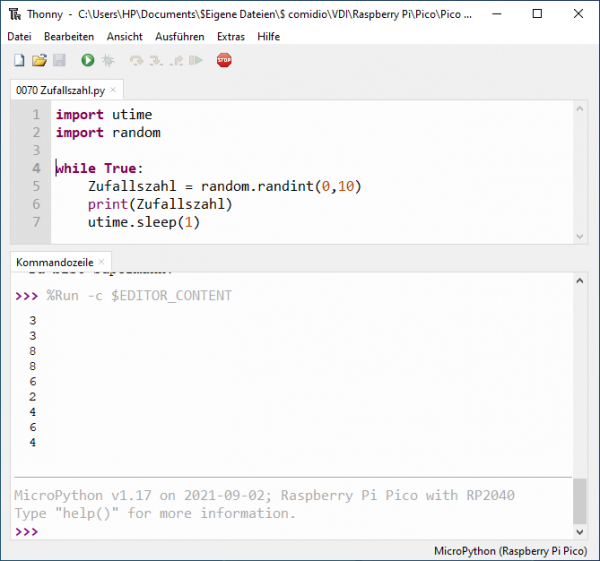
0070 Zufallszahl.py
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
import utime
import random
while True:
Zufallszahl = random.randint(0,10)
print(Zufallszahl)
utime.sleep(1)
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
Was macht das Programm?
- Es listet Zufallszahlen im Sekundentakt auf.
Beschreibung der Befehle
- Die Bibliothek [random] bietet Funktionen zur Erzeugung von Zufallszahlen.
- [while true:] erzeugt, da mit "True" automatisch erfüllt, eine Endlos-Schleife.
- [random.randint] bietet eine Integer-Zahl (also Ganzzahl) zwischen und einschließlich des Anfangs-Werts (im Beispiel: 0) und des End-Werts (im Beispiel: 10).
- Durch [print] in Z6 wird die Zufallszahl in der Kommandozeile angezeigt.
- [utime.sleep(1)] verursacht eine 1-Sekunden-Pause bevor das Programm wieder zu Z5 springt um die nächste Zufallszahl zu erzeugen.
Was probieren ...?
- Die Anfangs- und End-Werte des Zufallszahlen-Bereichs in Z5 verändern.
- Die Pausenzeit in Z7 variieren.
- ...
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
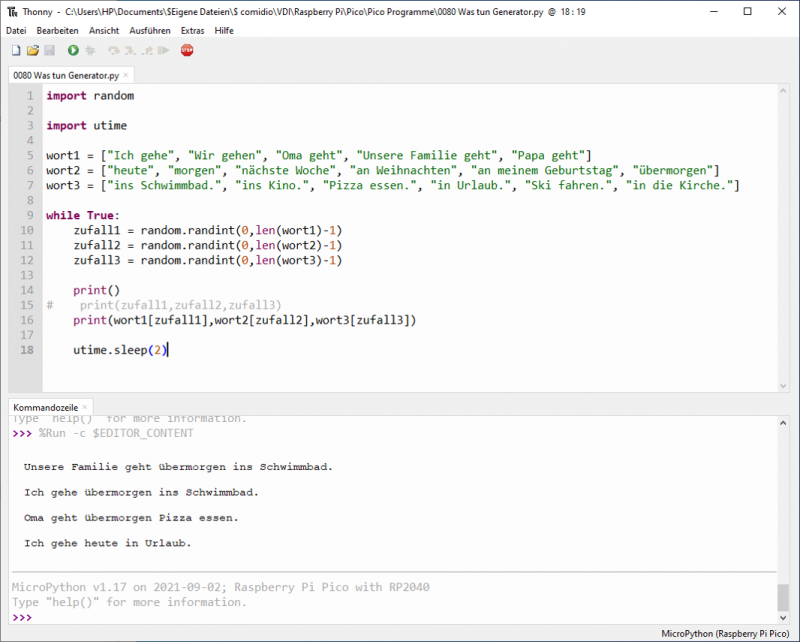
0080 Was tun Generator.py
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
import random
import utime
wort1 = ["Ich gehe", "Wir gehen", "Oma geht", "Unsere Familie geht", "Papa geht"]
wort2 = ["heute", "morgen", "nächste Woche", "an Weihnachten", "an meinem Geburtstag", "übermorgen"]
wort3 = ["ins Schwimmbad.", "ins Kino.", "Pizza essen.", "in Urlaub.", "Ski fahren.", "in die Kirche."]
while True:
zufall1 = random.randint(0,len(wort1)-1)
zufall2 = random.randint(0,len(wort2)-1)
zufall3 = random.randint(0,len(wort3)-1)
print()
# print(zufall1,zufall2,zufall3)
print(wort1[zufall1],wort2[zufall2],wort3[zufall3])
utime.sleep(2)
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
Was macht das Programm?
- Es bietet einen "Vorschlags-Generator", welcher Empfehlungen zu Freizeit-Aktivitäten im 2-Sekunden-Rhytmus anzeigt.
- 3 vorbestimmte Zeichengruppen werden jeweils zufällig ausgesucht und aneinandergereiht.
- Es ist ein Beispiel für die Anwendung von 3 Zufalls-Generatoren.
Beschreibung der Befehle
- wort1,2,3 in Z5-Z7 bilden jeweils Zeichen-Gruppen mit verschiedenen Anzahlen von Zeichen in Hochkommas, jeweils getrennt durch Kommas.
- Im Beispiel besteht "wort1" aus 5 Zeichengruppen und "wort2" und "wort3" aus jeweils 6 Zeichengruppen.
- [len(wort1)] ermittelt die Anzahl der Zeichengruppen in wort1, also im Beispiel: 5.
- "zufall1" ist ein Zufallswert zwischen 0 und (5-1=) 4.
- [wort1["0"]] bietet den ersten Wert und [wort1["4"]] bietet den fünften Wert jeweils aus wort1.
- [print] in Z16 setzt die drei Zeichen-Gruppen zusammen und zeigt so einen ganzen Satz in der Kommandozeile.
Was probieren ...?
- Personen & Aktivitäten in wort1, Zeitpunkte in wort2 und Orte in wort3 (jeweils in Anführungszeichen und durch Komma getrennt) ergänzen und/oder rausnehmen.
- Durch Entfernen/Setzen der Raute in Z15 die Zufalls-Zahlen zeigen/verbergen.
- ...
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
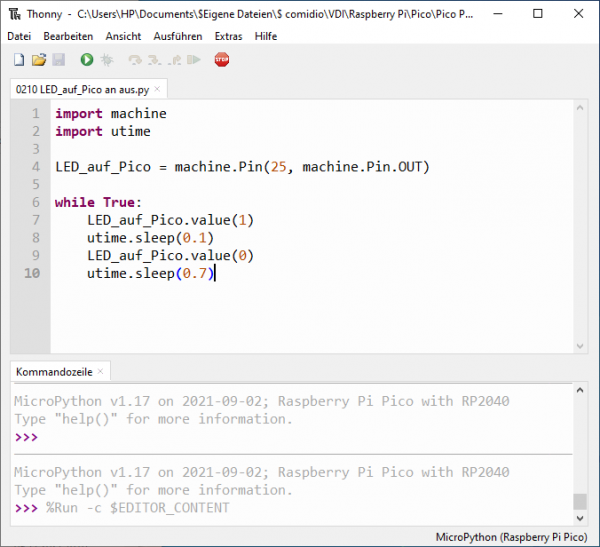
0210 LED_auf_Pico an aus.py
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
import machine
import utime
LED_auf_Pico = machine.Pin(25, machine.Pin.OUT)
while True:
LED_auf_Pico.value(1)
utime.sleep(0.1)
LED_auf_Pico.value(0)
utime.sleep(0.7)
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
Was macht das Programm?
- Es schaltet die sich auf dem Pico befindliche LED ein und aus.
Beschreibung der Befehle
- Die Bibliothek [machine] bietet die Nutzung von Ein- und Ausgabe-Funktionen auf dem Pico.
- Die Zuweisung in Z4 [machine.Pin(25, machine.Pin.OUT)] definiert einerseits (OUT) eine Signal-Ausgabe und andererseits das genutzte GPIO-Pin, nämlich 25, welches die interne LED ansteuert.
- [while true:] erzeugt, da mit "True" automatisch erfüllt, eine Endlos-Schleife, welche die danach eingerückten Befehle nacheinander wiederholend durchläuft.
- Die in Z4 definierte LED-Funktion kann mittels [.value(1)] eingeschaltet und mittels [.value(0)] ausgeschaltet werden.
- Die Pause in Z8 nach dem Einschalt-Befehl in Z7 definiert die LED-An-Dauer.
- Die Pause in Z10 nach dem Ausschalt-Befehl in Z9 definiert die LED-Aus-Dauer.
- Der Zyklus in der [while True:]-Schleife: einschalten - warten - ausschalten - warten - ... läuft endlos.
Was probieren ...?
- Beide [utime.sleep]-Werte verändern.
- ...
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
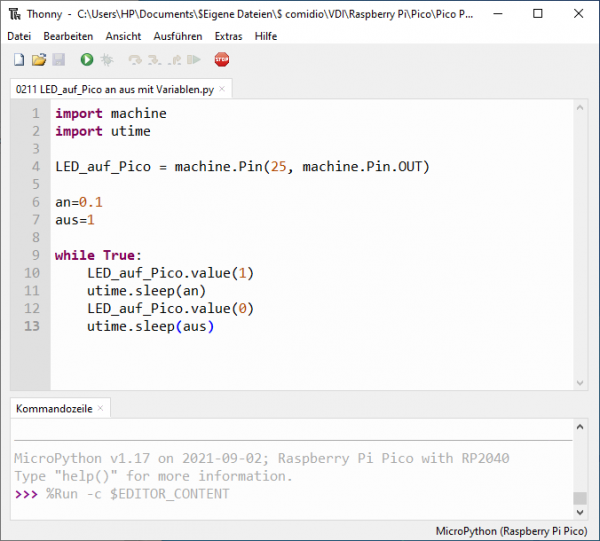
0211 LED_auf_Pico an aus mit Variablen.py
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
import machine
import utime
LED_auf_Pico = machine.Pin(25, machine.Pin.OUT)
an=0.1
aus=1
while True:
LED_auf_Pico.value(1)
utime.sleep(an)
LED_auf_Pico.value(0)
utime.sleep(aus)
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
Was macht das Programm?
- Es macht das selbe wie 0210: die sich auf dem Pico befindliche LED ein- und aus-schalten.
Beschreibung der Befehle
- Doch mit einem gewissen Unterschied: die Werte von [utime.sleep] in der jeweils folgenden Klammer werden nicht als Zahlenwerte (wie in 0210) eingegeben, sondern als Variable (z.B. "an" und " aus") die zu Beginn des Programms mit Werten belegt werden, und dann von den einzelnen Befehlen genutzt werden können. Dies ist besonders hilfreich, wenn die selben Zeit-Dauern öfters genutzt werden, wie z.B. beim Morse-Projekt.
Was probieren ...?
- Verändern der Werte, die den Variablen zugeordnet werden (in Z6 und Z7).
- Ändern der Variablen-Namen "an" und "aus".
- ...
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
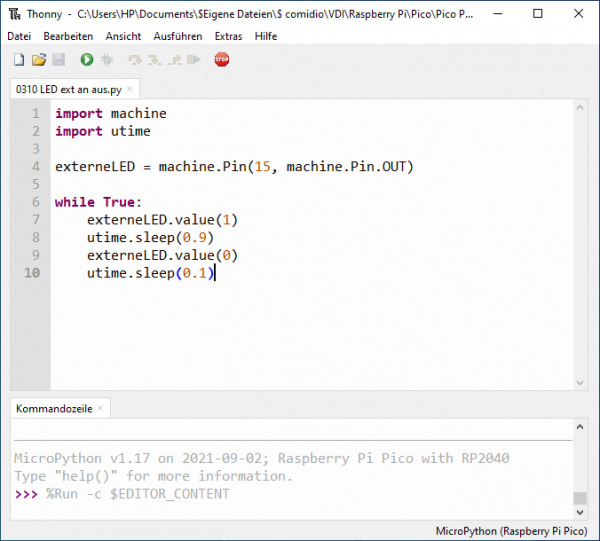
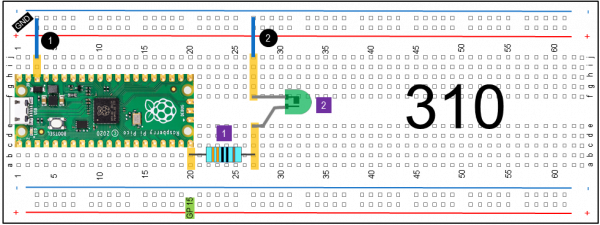
0310 LED ext an aus.py
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
import machine
import utime
externeLED = machine.Pin(15, machine.Pin.OUT)
while True:
externeLED.value(1)
utime.sleep(0.9)
externeLED.value(0)
utime.sleep(0.1)
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
Was macht das Programm?
- Es macht fast das selbe wie 0210, nämlich eine LED ein- und ausschalten, aber dieses Mal eine externe LED.
Beschreibung der Befehle
- In Z4 wird nun GP15 adressiert, und zwar durch "Pin.OUT" als Ausgang, an den z.B. eine LED angeschlossen werden kann.
- Die LED wird dort mit ihrer "Plus-Seite", der "Anode" (das ist der längere Draht) über einen 330 Ohm-Widerstand angeschlossen.
- Die LED wird mit ihrer "Minus-Seite", der "Kathode" (das ist der kürzere Draht) mit der Minus-Längsleiste des Steckbretts verbunden.
Was probieren ...?
- GP Pin ändern und entsprechend den Widerstand "umstecken".
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
Workshop PicoBello-02
Projekte / Programme
Im Folgenden sind die in diesem Workshop besprochenen Programme aufgeführt (TLN = Teilnehmende; WSL = Workshop-Leiter).
Die Projekt-/Programm-Beschreibungen umfassen:
- Screenshot des Programms in Thonny, speziell, wenn in der Kommandozeile Programm-Eingaben und -Ausgaben gezeigt werden sollen,
- kopierfähiger Programmcode im Bereich "MicroPython Programm-Code für Thommy",
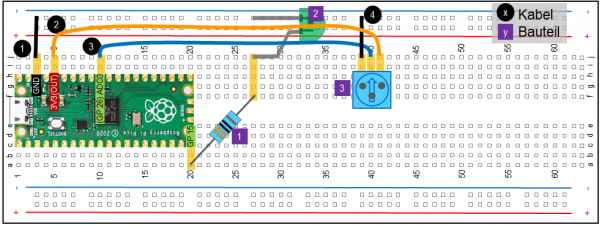
- Steckbrett-Graphik mit benötigten Kabel-Verbindungen und Bauteilen,
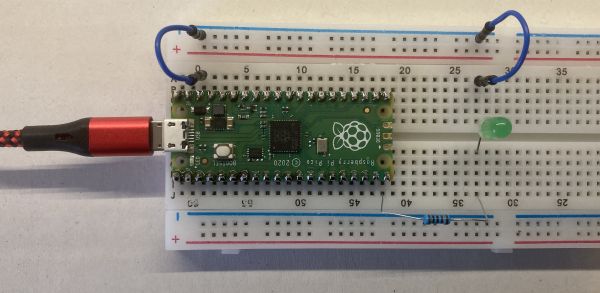
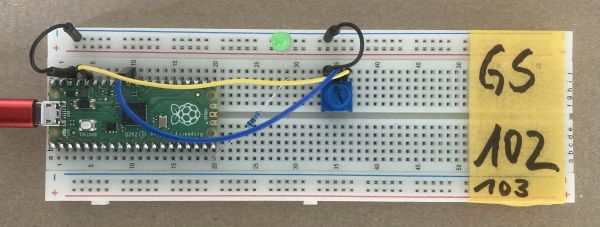
- Steckbrett-Foto mit einer Beispiel-"Steckung".
In den Workshops gehen wir folgendermaßen vor:
- Der WSL erklärt kurz Sinn und Zweck des nächsten Projekts.
- Der WSL zeigt seine Projekt-Steckung live per Video, startet das Programm und zeigt und erklärt die Programm-Auswirkungen.
- Die TLN kopieren den Programm-Code in ihren eigenen Thonny-Editor.
- Die TLN bauen ihre eigene Steckung anhand der Steckbrett-Graphik und des Steckbrett-Fotos.
- Die TLN starten jeweils ihr Programm und beobachten die Programm-Auswirkungen.
- Die TLN bestätigen die planmäßige Ausführung, oder beschreiben ein Problem oder einen Fehler.
- Gemeinsam werden Problem oder Fehler besprochen und GEKLÄRT.
- Erst wenn alle TLN-Programme planmäßig laufen, wird das nächste Programm in Anmgriff genommen.
- Abhängig vom Workshop-Verlauf bestimmt der WSL Projekt-Inhalte und -Folge des Workshops.
Die Projekte / Programme sollen die Basis dafür bieten, dass die TLN die Programme anschließend selbständig nachvollziehen und erweitern, sowie eigene Projekte planen und durchführen können.
- Was macht das Programm? erklärt, was das jeweilige Programm bewirkt.
- Beschreibung der Befehle erläutert kurz benutzte Programm-Befehle .
- Was probieren ...? gibt Anregungen zum selber experimentieren .
Mit eckigen Klammern [ ] werden Programm-Befehle beschrieben; "Z4" steht für Zeile 4.
Viel Spaß beim Testen und Ausprobieren ...
Workshop PicoBello-03
Projekte / Programme
Im Folgenden sind die in PicoBello-03 besprochenen Programme aufgeführt.
Folgende zwei Varianten beschreiben, wie die hier vorgestellten Programme in den eigenen Thonny-Editor gelangen können:
- Durch einen Klick mit der linken Maus-Taste auf den Media: xyz .txt –Link öffnet sich ein Browser-Fenster mit den genutzten MicroPython-Programm-Befehlen, die von dort in den Thonny-Editor kopiert werden können ...
oder ...
- Durch einen Klick mit der rechten Maus-Taste auf den Media: xyz .txt –Link öffnet sich ein anderes Browser-Fenster, über welches über „Ziel speichern unter …“ die Text-Dateien mit den MicroPython-Programm-Befehlen auf den eigenen PC heruntergeladen werden können. Von dort können die Befehle in den Thonny-Editor kopiert werden.
- Was macht das Programm? erklärt, was das jeweilige Programm bewirkt.
- Beschreibung der Befehle erläutert kurz benutzte Programm-Befehle .
- Was probieren ...? gibt Anregungen zum selber experimentieren .
Mit eckigen Klammern [ ] werden Programm-Befehle beschrieben; "Z4" steht für Zeile 4.
Viel Spaß beim Testen und Ausprobieren ...
GS_102 Fading LED with PWM.py
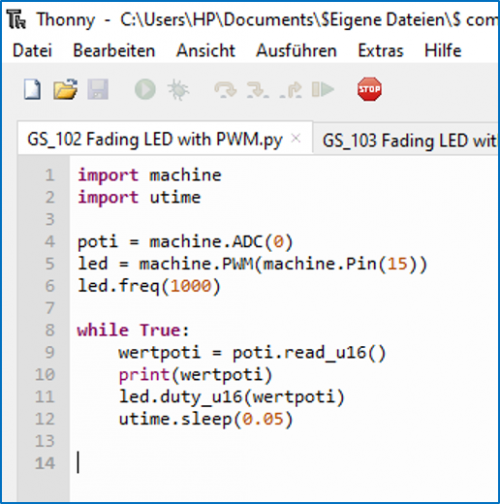
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
import machine
import utime
poti = machine.ADC(0)
led = machine.PWM(machine.Pin(15))
led.freq(1000)
while True:
wertpoti = poti.read_u16()
print(wertpoti)
led.duty_u16(wertpoti)
utime.sleep(0.05)
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
GS_103 Fading LED with PWM auto.py
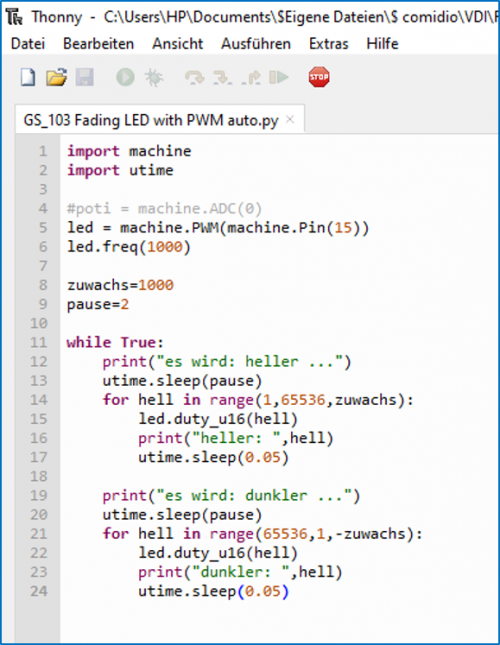
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
import machine
import utime
#poti = machine.ADC(0)
led = machine.PWM(machine.Pin(15))
led.freq(1000)
zuwachs=1000
pause=2
while True:
print("es wird: heller ...")
utime.sleep(pause)
for hell in range(1,65536,zuwachs):
led.duty_u16(hell)
print("heller: ",hell)
utime.sleep(0.05)
print("es wird: dunkler ...")
utime.sleep(pause)
for hell in range(65536,1,-zuwachs):
led.duty_u16(hell)
print("dunkler: ",hell)
utime.sleep(0.05)
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
GS_085 HC-SR501 PIR-Alarm LED.py
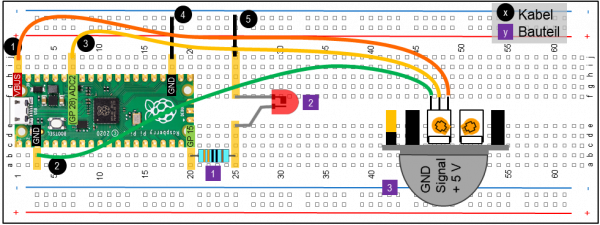
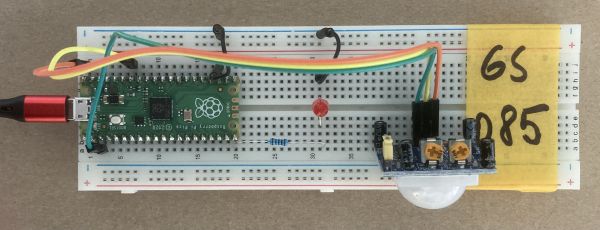
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
import machine
import utime
k=0
sensor_pir = machine.Pin(28, machine.Pin.IN, machine.Pin.PULL_DOWN)
led = machine.Pin(15, machine.Pin.OUT)
def pir_handler(pin):
global k
utime.sleep_ms(100)
if pin.value():
print("ALARM! Motion detected!")
for i in range(20):
led.toggle()
utime.sleep_ms(100)
k=0
sensor_pir.irq(trigger=machine.Pin.IRQ_RISING, handler=pir_handler)
while True:
print(k,"kein Interrupt")
k=k+1
utime.sleep(.2)
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
0440 Temperaturmessung TMP36.py
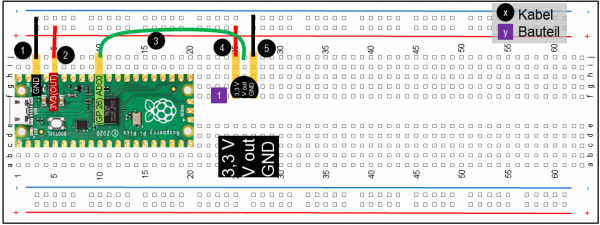
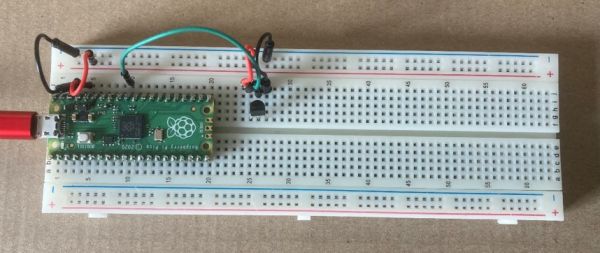
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
from machine import ADC
import utime
AnalogIn = ADC(0)
Umw_DigitalIn_in_mV = 3300 / 65535
k=0
while True:
k=k+1
DigiV_0_bis_65535 = AnalogIn.read_u16()
mV = DigiV_0_bis_65535 * Umw_DigitalIn_in_mV
Temp = (mV - 500.0) / 10.0
print(k," DigiV_0_bis_65535 = ",DigiV_0_bis_65535," mV = ", mV," Temperatur = ", Temp," Grad Celsius")
utime.sleep(1)
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
0450 Temperaturmessung TMP36 und Werte speichern.py
Steckung wie zuvor 0440 Temperaturmessung TMP36.py

==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
from machine import ADC
import utime
AnalogIn = ADC(0)
Umw_DigitalIn_in_mV = 3300 / 65535
k=0
DateiT = open("Keller-Temperaturen.txt","w")
DateiT.write("Temperaturen im Keller\n")
while True:
k=k+1
DigiV_0_bis_65535 = AnalogIn.read_u16()
mV = DigiV_0_bis_65535 * Umw_DigitalIn_in_mV
Temp = (mV - 500.0) / 10.0
TempStr = str(Temp)[:5]
SpeicherZeile = str(k) + " " + TempStr + "\n"
DateiT.write(SpeicherZeile)
DateiT.flush()
print(k," DigiV_0_bis_65535 = ",DigiV_0_bis_65535," mV = ", mV," Temperatur = ", Temp," Grad Celsius")
print(k," ", TempStr," Grad Celsius")
utime.sleep(1)
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
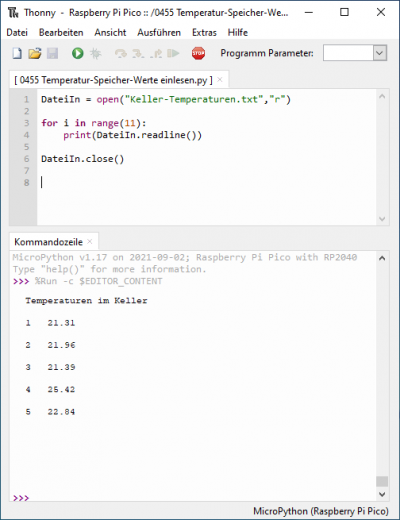
0455 Temperatur-Speicher-Werte einlesen.py
... ohne, bzw. beliebige Steckung ...
==Anfang=========== MicroPython Programm-Code für Thommy ===========Anfang==
DateiIn = open("Keller-Temperaturen.txt","r")
for i in range(11):
print(DateiIn.readline())
DateiIn.close()
===Ende============ MicroPython Programm-Code für Thommy ============Ende===
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
Ressourcen
Pin Belegung am Pico

-> Inhaltsverzeichnis (dieses Ressourcen-Wikis)
MicroPython auf Pico und Thonny auf PC installieren
MicroPython auf Pico installieren
1) USB-Kabel zuerst an Pico einstecken (Achtung: breite Stecker-Seite nach oben).
-> Inhaltsverzeichnis (dieses Ressourcen-Wikis)

-> Inhaltsverzeichnis (dieses Ressourcen-Wikis)
2) „BOOTSEL“-Taster auf Pico drücken und gedrückt halten, und während gedrückt: USB-Kabel an PC einstecken … und bis 3 zählen.
-> Inhaltsverzeichnis (dieses Ressourcen-Wikis)
3) „BOOTSEL“-Taster auf Pico loslassen.
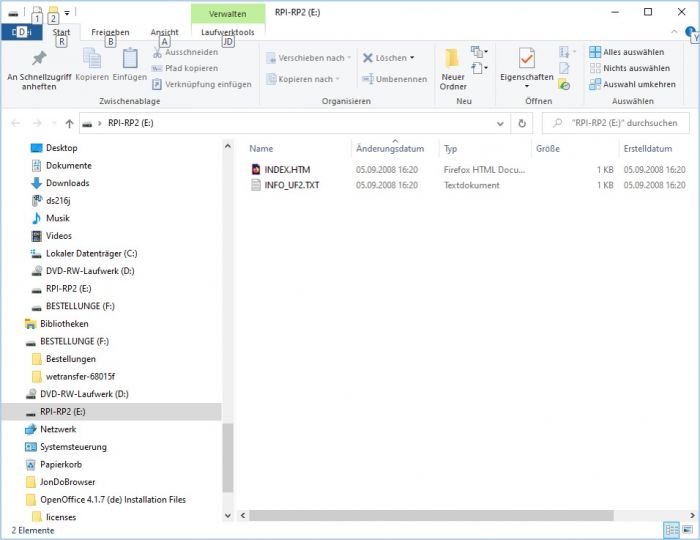
4) Neues USB-Laufwerk erscheint mit Dateien:
INDEX.HTM und INFO_UF2.TXT
-> Inhaltsverzeichnis (dieses Ressourcen-Wikis)
- Doppel-Klick (mit linker Maustaste) auf Symbol über Name „INDEX.HTM“.
- Die Seite „Welcome to your Raspberry Pi Pico“ öffnet sich.
- Klicken (wenn nicht vermerkt, immer mit linker Maustaste) auf „Getting started with MicroPython“.
- Nach unten scrollen, bis grüner Button mit weißer Schrift „Download UF2 file“ erscheint.
(Die Datei-Endung "UF2" steht für "USB Flashing Format", einem von Microsoft entwickelten Datei-Format, um Microcontroller-Bertriebssysteme über USB-Speicher zu "flashen" (= in den Speicher des Microcontrollers zu laden). - Klick auf diesen Button.
- Die UF2-Datei wird in den Download-Ordner heruntergeladen.
- Download-Ordner öffnen und Download-Fenster neben (automatisch geöffnetem) USB-Laufwerk-Fenster anordnen.
- Datei mit „.UF2“ Endung vom Download-Fenster in das USB-Laufwerk-Fenster „ziehen“ (= kopieren).
- Kurz darauf verschwindet das USB-Laufwerk-Fenster … und somit wurde MicroPython auf den Pico geladen.
Entwicklungsumgebung "Thonny" auf PC herunterladen und installieren
- Von thonny.org die für das Betriebssystem passende Thonny-Programmier-Umgebung herunterladen.
- Das heruntergeladene Thonny (durch Doppel-Klick auf die Datei) installieren.
- Thonny starten.
- Sicherstellen, dass das USB-Kabel Pico mit PC (noch) verbindet.
- Im Thonny-Fenster unten rechts auswählen:
“MicroPython (Raspberry Pi Pico)“ - Klick auf grünen Plus-Button („New“) startet neues, leeres Thonny-Programmier-Fenster.
- Über „Load“ und „Save“ können (auch eigene) Programme geladen, bzw. gespeichert werden … sowohl auf dem PC, wie auch auf dem Pico.
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
Pico Internet-Ressourcen
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
Equipment Anbieter
- https://www.blog.berrybase.de
- https://www.blog.berrybase.de/blog/2021/02/08/erste-schritte-mit-dem-raspberry-pi-pico/
- https://www.elektor.de/raspberry-pi-pico-rp2040
- https://www.reichelt.de/raspberry-pi-pico-rp2040-cortex-m0-microusb-rasp-pi-pico-p295706.html?CCOUNTRY=445&LANGUAGE=de
- https://www.pollin.de/p/neigungssensor-sw-660-180123
- https://www.makershop.de/sensoren/page/2/
- https://www.welectron.com/Raspberry-Pi-Pico
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
Pico Video-Links
| Nr | Titel | Quelle | Bemerkung |
|---|---|---|---|
| 1 | Raspberry Pi Pico Complete Guide, Pinout+Features+ADC+I2C+OLED+Internal Temperature Sensor+DHT11 - YouTube | https://www.youtube.com/watch?v=oaM80GyVIwA&t=844s | |
| 2 | Raspberry Pi PICO, Starting With MicroPython + Examples; I2C OLED, ADC, PWM - YouTube | https://www.youtube.com/watch?v=zlKJ5hvfs6s | |
| 3 | Raspberry Pi Pico - YouTube | https://www.youtube.com/watch?v=peLH-HNza44 | LED Lauflicht |
| 4 | Raspberry Pi Pico: Inputs & Servo Control - YouTube | https://www.youtube.com/watch?v=TDj2kcSA-68 | |
| 5 | Raspberry Pi Pico - Control the (I/O) World - YouTube | https://www.youtube.com/watch?v=Zy64kZEM_bg | |
| 6 | Raspberry Pi Pico der interne Temperatursensor - YouTube | https://www.youtube.com/watch?v=J8AuGEGgqYM | |
| 7 | Raspberry Pi Pico Einführung mit dem LCD 1602 (16x2) + HD44780 I2C Adapter in Thonny MicroPython - YouTube | https://www.youtube.com/watch?v=IkDhN8EbOUs | |
| 8 | Raspberry Pi Pico (RP2040) SPI Example with MicroPython and C/C++, Digi-Key Electronics - YouTube | https://www.youtube.com/watch?v=jdCnqiov6es | |
| 9 | How to Use WS2812B RGB LEDs with Raspberry Pi Pico (using MicroPython) - YouTube | https://www.youtube.com/watch?v=PCHahR7jBbQ | |
| 10 | Talk to Your Pico Over Serial, Raspberry Pi Pico UART Tutorial - YouTube | https://www.youtube.com/watch?v=pbWhoJdYA1s | |
| 11 | How to set up a wake word on the Raspberry Pi Pico - Easy as AI - YouTube | https://www.youtube.com/watch?v=V0KXZGhHUQY | |
| 12 | Raspberry Pi Pico Interrupt Problems - YouTube | https://www.youtube.com/watch?v=-8sWuLtXS08 | |
| 13 | USB Serial Input on the Raspberry Pi Pico - YouTube | https://www.youtube.com/watch?v=NHwMJZwRo7k | |
| 14 | Beginners Guide to SPI on the Raspberry Pi Pico (BMP280 Example) - YouTube | https://www.youtube.com/watch?v=s7Lud1Gqrqw | |
| 15 | using Interrupts on the raspberry Pi pico, Micropython, simple Demo and code - YouTube | https://www.youtube.com/watch?v=Qw2xr5a2rSA | |
| 16 | Raspberry Pi Pico UART setup, Send data to PC with UART, Real time data plotting, Matplotlib - YouTube | https://www.youtube.com/watch?v=PFdJvAbHB5c | |
| 17 | How to read the temperature sensor on the Raspberry Pi Pico - YouTube | https://www.youtube.com/watch?v=PYOaO1yW0rY | |
| 18 | Using I2C between Raspberry Pi computer, a Pico microcontroller and an Arduino - YouTube | https://www.youtube.com/watch?v=Wh-SjhngILU | |
| 19 | raspberry pi pico, raspberry pi pico ultrasonic sensor, raspberry pi pico micropython - YouTube | https://www.youtube.com/watch?v=Uti3s0XGsEY | |
| 20 | Raspberry Pi Pico #1 - Der leichte Einstieg! | https://www.youtube.com/watch?v=HigJJ5HhaAA | |
| 21 | Raspberry Pi Pico Servo Motors via PWM | https://www.youtube.com/watch?v=NqchLYWHCzA | |
| 22 | LED anschließen und Vorwiderstand berechnen | https://www.youtube.com/watch?v=DBQBNj3xJR8 | |
| 23 | Alles über Widerstände und wie man die Farbringe liest. | https://www.youtube.com/watch?v=C-Ywtr2ftxA | |
| 24 | |||
| 25 | |||
| 26 | |||
| 27 | |||
| 28 |
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
Fotos
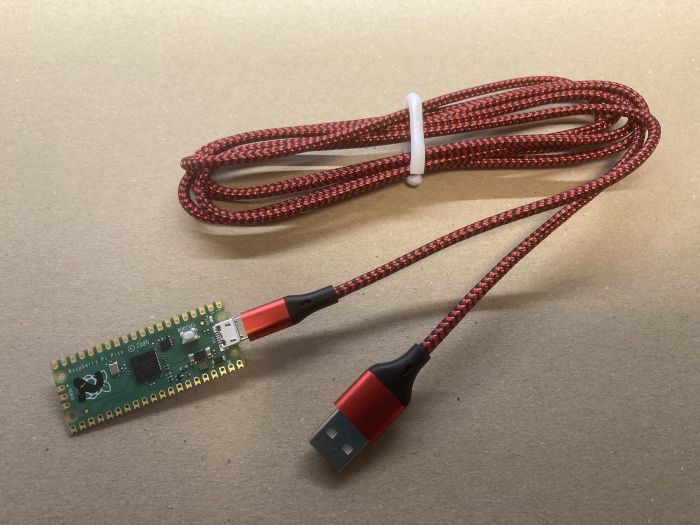
- Pico „pur“ mit USB-Kabel zum PC
-> Inhaltsverzeichnis (dieses Ressourcen-Wikis)
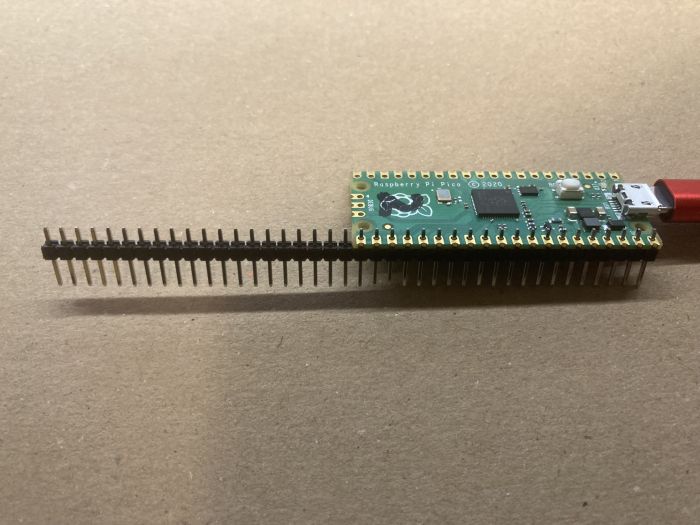
- Pico mit anzulötenden Stiftleisten
-> Inhaltsverzeichnis (dieses Ressourcen-Wikis)
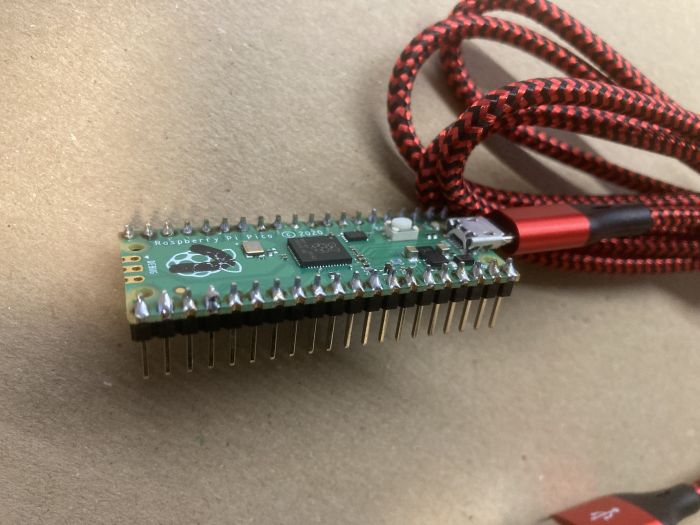
- Pico mit angelöteten Stiftleisten
-> Inhaltsverzeichnis (dieses Ressourcen-Wikis)
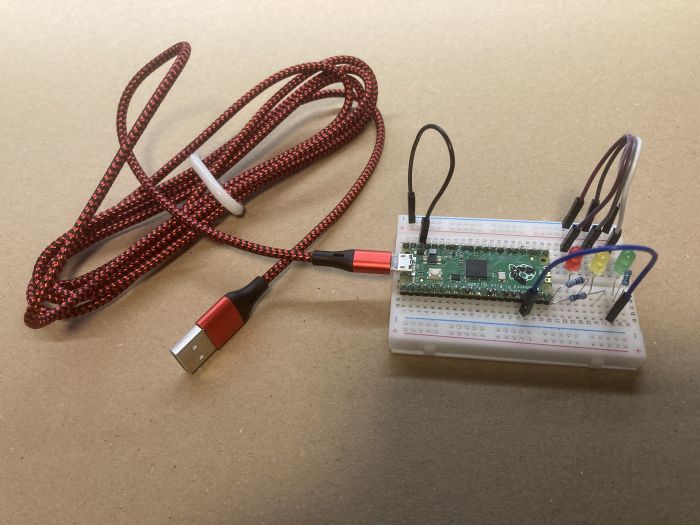
- Pico auf Breadboard mit Ampel und USB-Kabel
-> Inhaltsverzeichnis (dieses Ressourcen-Wikis)
Pico Projekt-Ideen
| Nr | Idee | Initiator | Status | Weiter-Verfolgung |
|---|---|---|---|---|
| 1 | Temperatur-Messung "am" Pico | |||
| 2 | Überwachungs-Thermometer für Innenräume,
für Gefrier- und Kühlschrank (mit Schwelle und Alarm) |
|||
| 3 | Analyse von Holzkäfer-Geräuschen z.B. im Dachstuhl | |||
| 4 | Garagentor-Status abfragen z.B. für Garage | |||
| 5 | Briefkasten (Posteingang) | |||
| 6 | Füllstandsmesser z.B. für Brunnen | |||
| 7 | Abstandsmesser z.B. Corona | |||
| 8 | Feuchtigkeits-Monitoring Pflanzenerde | |||
| 9 | Wasserwerfer z.B. "für" Katze | |||
| 10 | Lauflichtsteuerung | |||
| 11 | Nametag (feststehend; mit Durchlauf) | |||
| 12 | Rhytmus-Schalter (z.B. mit Klatsch- oder Taster-Erkennung) | |||
| 13 | Druckmessung z.B. Nordic-Walking-Stöcke | |||
| 14 | logische Schaltungen, Gatter | |||
| 15 | Messung Sonnenscheinausbeute (Stärke, Dauer, Zeiten, usw.) | |||
| 16 | Messung Wasserparameter z.B. für einen Teich (Temperatur, Sauerstoffgehalt, Wasserdichte, usw.) | |||
| 17 | Dämmerungsschalter (z.B. Beleuchtung ermöglichen) | |||
| 18 | Zahlenschloss mit Zahlenfeld (z.B. für Türöffner) | |||
| 19 | Morse-Dekodierer (z.B. per Taster oder Mikrofon) | |||
| 20 | GPS-Logger (z.B. für Alibi: wo war ich wann?) | |||
| 21 | Diebstahl-/Bewegungs-Warner (z.B. am Gepäckstück) | |||
| 22 | Annäherungsschalter (z.B. Wasserhahn schalten) | |||
| 23 | Bewegungsmelder (z.B. Raumlicht oder Alarm schalten) | |||
| 24 | Detektion und Aufnahme von Tier (und Mensch) im Garten | |||
| 25 | Integration mit bestehender Haus-Automation | |||
| 26 | Töne erzeugen "Klavier"? | |||
| 27 | Zimmer-Ampel mit Anforderung | |||
| 28 | Entscheidungshilfe (mit Zufallszahlengenerator) | |||
| 29 | Weihnachts-LED-Bäumchen | |||
| 30 | Eier-Uhr | |||
| 31 | Springbrunnen-Steuerung | |||
| 32 | Zeit- und annäherungs-gesteuerter Adventskranz | |||
| 33 | Eisenbahn-Anwendungen | |||
| 34 | ||||
| 35 | ||||
| 36 | ||||
| 37 | ||||
| 38 | ||||
| 39 |
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
Pico Offene Fragen
| Nr | Frage | Vermutung | Antwort | Quelle | Referenzen |
|---|---|---|---|---|---|
| 1 | |||||
| 2 | |||||
| 3 | |||||
| 4 | |||||
| 5 | |||||
| 6 | |||||
| 7 | |||||
| 8 | |||||
| 9 |