PicoPro: Unterschied zwischen den Versionen
Carbon (Diskussion | Beiträge) |
Carbon (Diskussion | Beiträge) |
||
| Zeile 29: | Zeile 29: | ||
[[#top|-> <u>Inhaltsverzeichnis</u> (dieses PicoBello-Wikis)]] | [[#top|-> <u>Inhaltsverzeichnis</u> (dieses PicoBello-Wikis)]] | ||
<br /><br /> | <br /><br /> | ||
| + | |||
| + | Ich habe dann in meiner alten Formelsammlung - die ich noch aus Studienzeiten aufgehoben hatte - nachgeschaut und folgendes gefunden: | ||
[[Datei:PP-002-MagPen-Image-02.png|600px|link=]]<br /><br /> | [[Datei:PP-002-MagPen-Image-02.png|600px|link=]]<br /><br /> | ||
| Zeile 34: | Zeile 36: | ||
[[#top|-> <u>Inhaltsverzeichnis</u> (dieses PicoBello-Wikis)]] | [[#top|-> <u>Inhaltsverzeichnis</u> (dieses PicoBello-Wikis)]] | ||
<br /><br /> | <br /><br /> | ||
| + | |||
| + | Danach ist die Schwingungsdauer T nur von der Pendellänge. Das hat mir sehr zugesagt.<br /> | ||
| + | Bei einer Pendellänge von ca. 1 Meter ergibt sich rechnerisch eine Schwingungsdauer von ca. 2 Sekunden (Man nennt das auch: Sekundenpendel).<br /> | ||
| + | Eine solche Lösung erschien mir praktisch sehr brauchbar für die Machbarkeit und sie sollte auch eine gute Beobachtung ermöglichen und auch ausreichend Platz für einen „Antrieb“ den man ja nicht sehen soll und der irgendwo versteckt werden muss (Magnete, Elektronik, Batterien, etc.).<br /> | ||
| + | Der mechanische Aufbau war schnell fertiggestellt. Erwähnenswert ist vielleicht noch, dass ich zwei Kugellager eingebaut habe um die Reibung zu minimieren. Ich habe dann mit verschiedenen „Antriebslösungen“ experimentiert… | ||
| + | Zunächst habe ich versucht mit einem einfachen elektronischen Zähler mimt einem angeflanschten Relais einen Elektromagneten zyklisch ein und auszuschalten. Dies war eine reine Steuerung, d.h. kein Sensor wurde verbaut. | ||
[[Datei:PP-002-MagPen-Image-03.png|600px|link=]]<br /><br /> | [[Datei:PP-002-MagPen-Image-03.png|600px|link=]]<br /><br /> | ||
Version vom 18. Juli 2023, 09:27 Uhr
PicoPro-Konzept
Dies ist ein Wiki zur Beschreibung von Pico-Projekten, welche Teilnehmer von PicoBello-Workshops seitens VDI und Elektronik-Kompendium.de veröffentlichen, damit interessierte Pico-Freunde Anregungen und Programmcode übernehmen und für eigene Projekte anpassen können.
- Die Autoren bestätigen ausdrücklich, dass sie die Rechte an den Inhalten besitzen und und die Weiternutzung durch Dritte erlauben.
PicoPro-Beschreibungen
Die Pico-Projekte haben initial folgende Struktur:
- Die Story
- Projekt-Beschreibung mit Intention und Einsatzgebiet(en)
- Empfohlene Vorgehensweise
- Tipps & Tricks
- Schaltbilder
- Fotos
- Programmcode mit Kommentaren
- Stückliste
- Aufwand für Nachbau
- Autor-Kontaktmöglichkeit(en)
Das magische Pendel
Die Story
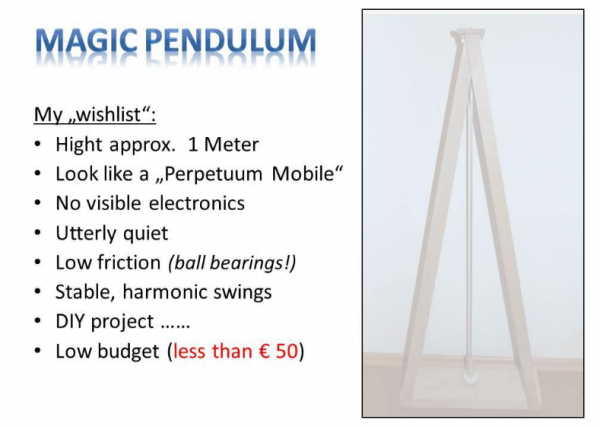
Das „Magisches Pendel“ – Die Geschichte eines praktischen Versuchs
Das ganze fing damit an, dass ich mir einen alten Traum erfüllen wollte und zwar den Bau eines „Perpetuum Mobiles“. Wie jeder weiß, ist das nicht möglich, also wollte ich wenigstens etwas bauen, was einem Perpetuum Mobile ähnlich sieht und von außen soll nicht erkennbar sein, mit welcher Technologie das ganze bewerkstelligt wird, so dass zumindest der Eindruck eines „Perpetuum Mobiles“ entsteht.
Schnell war mir klar, dass das am einfachsten mit einem Pendel geht, welches einfach dauernd hin und her schwingt. Zunächst wollte ich mir ein solches kaufen aber tatsächlich gab bzw. gibt es da nichts vernünftiges, also habe ich mich entschlossen so etwas „versuchsweise“ selber zu bauen....
Die erste Folie zeigt ein paar erste Überlegungen, die ich dazu hatte:
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
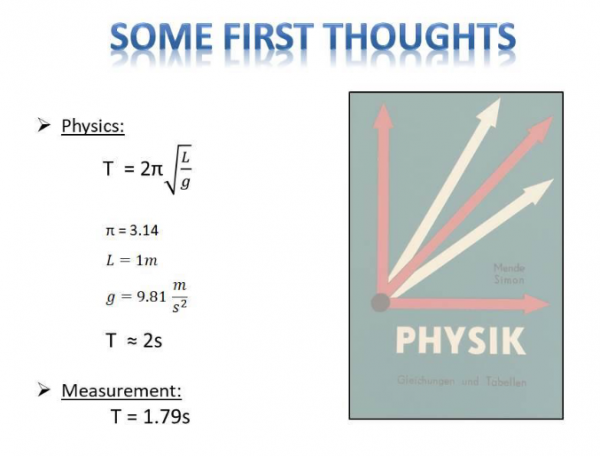
Ich habe dann in meiner alten Formelsammlung - die ich noch aus Studienzeiten aufgehoben hatte - nachgeschaut und folgendes gefunden:
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
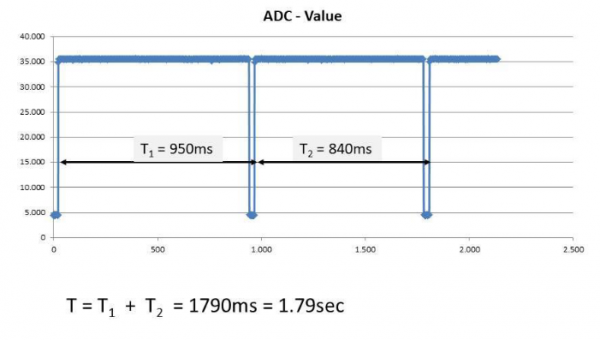
Danach ist die Schwingungsdauer T nur von der Pendellänge. Das hat mir sehr zugesagt.
Bei einer Pendellänge von ca. 1 Meter ergibt sich rechnerisch eine Schwingungsdauer von ca. 2 Sekunden (Man nennt das auch: Sekundenpendel).
Eine solche Lösung erschien mir praktisch sehr brauchbar für die Machbarkeit und sie sollte auch eine gute Beobachtung ermöglichen und auch ausreichend Platz für einen „Antrieb“ den man ja nicht sehen soll und der irgendwo versteckt werden muss (Magnete, Elektronik, Batterien, etc.).
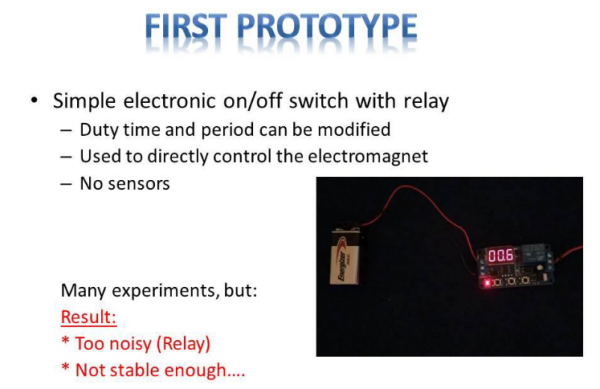
Der mechanische Aufbau war schnell fertiggestellt. Erwähnenswert ist vielleicht noch, dass ich zwei Kugellager eingebaut habe um die Reibung zu minimieren. Ich habe dann mit verschiedenen „Antriebslösungen“ experimentiert…
Zunächst habe ich versucht mit einem einfachen elektronischen Zähler mimt einem angeflanschten Relais einen Elektromagneten zyklisch ein und auszuschalten. Dies war eine reine Steuerung, d.h. kein Sensor wurde verbaut.
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)

-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)

-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
Projekt-Beschreibung mit Intention und Einsatzgebiet(en)
Empfohlene Vorgehensweise
Tipps & Tricks
Schaltbilder
Fotos
Programmcode mit Kommentaren
Stückliste
Aufwand für Nachbau
Autor-Kontaktmöglichkeit(en)
-> Inhaltsverzeichnis (dieses PicoBello-Wikis)
Material-Set Pico
- 1 Raspberry Pi Pico, RP2040 Mikrocontroller mit angelöteten Stiftleisten auf Steckbrett mit 830 Kontakten
- 1 Steckbrett mit 400 Kontakten
- 1 USB-Kabel 1,5 m mit Micro USB Stecker
- 40 Verbindungskabel 10 cm